皮肤是我们身体上面最大的器官,承担着感知压力、温度、疼痛等一系列重要信息的功能。通过肢体接触获得的上述信息能够帮助我们建立起相互间情感的纽带,是社交的重要组成部分,也是人与机器人最大的差异之一。人造电子皮肤作为一种可以产生“触觉”的柔性薄膜状电子系统,推动了机器人的设计、可穿戴设备及人工智能等领域的发展。虽然目前人造电子皮肤已能实现了压力的空间分布辨识,但是尚不能有效区分压力源。利用人造电子皮肤从环境中识别出人体触摸将为实现机器人的情感交流奠定基础,这也是此领域面临的重大挑战。此外,目前人造电子皮肤在实际应用时仍存在诸多难题。例如,基于场效应管以及硅基集成电路技术的柔性传感设备对材料与组装的要求苛刻、成本高;电阻型压敏材料依赖较高的外加电场以获得电学信号,与自然皮肤的应用条件存在较大差异。
石墨烯泡沫膜的触敏示意图
针对上述存在的需求和问题,研究人员开发了一种可识别人体触摸的柔性薄膜传感器。研究人员以氧化石墨烯作为原料,利用冰模板辅助抽滤的方法构筑了三维结构的石墨烯气凝胶泡沫膜(RGOF)传感器。薄膜层之间由纵向石墨烯片连接,因此具有了较低的体积电阻(1.5±0.3 Ω·sq.-1)和较高的电导率(53±3 S·cm-1)。
RGOF响应原理基于石墨烯的热电转化特性,工作所需能源来自于热能,不需再接入外界电源供电。更重要的是,由于人体体温与环境物体表面温度存在显着的差异,RGOF利用石墨烯的热电效应可将人体触摸从橡胶、玻璃、陶瓷、凝胶、金属、塑料等常见物体的触碰中区别出来。因此,RGOF凝胶薄膜便可以有效地分辨人体触摸,这种特性正是人类利用皮肤通过肢体接触与他人进行情感交流的基础。
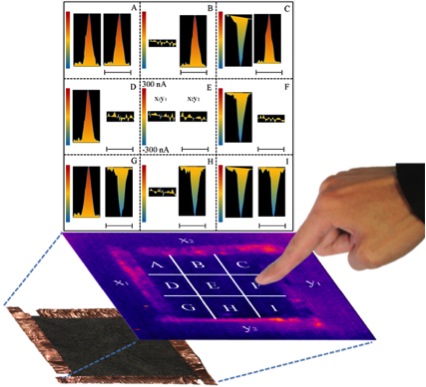
RGOF在厚度方向具有良好的弹性,其电学性能与热扩散行为随薄膜形变而发生改变,因而还可实现手指触摸应力的强度检测。另外,将RGOF与两组测试电极相连,将其表面划分为9个区域,得到一种3×3分辨率的柔性触敏器件。在人体皮肤触摸下,器件表面9个部分得到9种不同触敏电流结果,因此可以通过触敏电流分辨触点区域。
RGOF传感器具有结构简洁、成本低、有望规模化生产等特点,其高柔性及弹性也能符合模拟皮肤的需求,因此具有了重要的应用价值,有望作为一种新型人造电子皮肤服务于未来机器人、义肢使用者以及可穿戴设备上。
新闻来源:石墨烯网http://www.graphenes.net/news/show-336.html
 粤公网安备 44190002005690号
粤公网安备 44190002005690号
